Projects
This research has been co‐financed by the European Union and Greek national funds through the Operational Program Competitiveness, Entrepreneurship and Innovation, under the call RESEARCH – CREATE – INNOVATE (project code: T2EDK- 02504).
| Period: July 2020 – July 2023 | Budget: 922.625,00€ |
| Principal Investigator: Ergina Kavallieratou | |
Project Overview
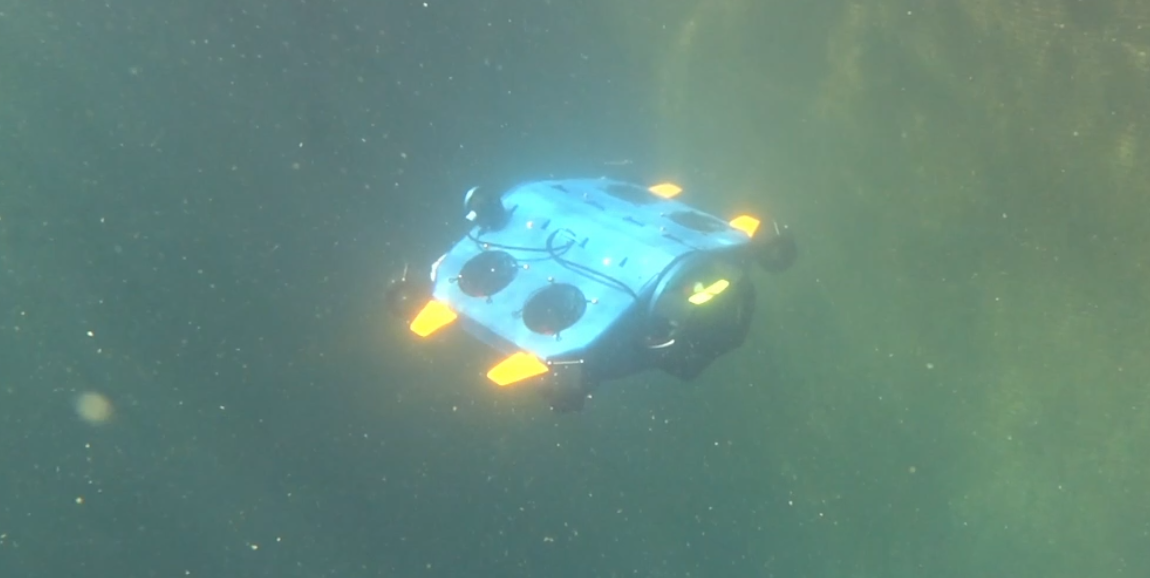
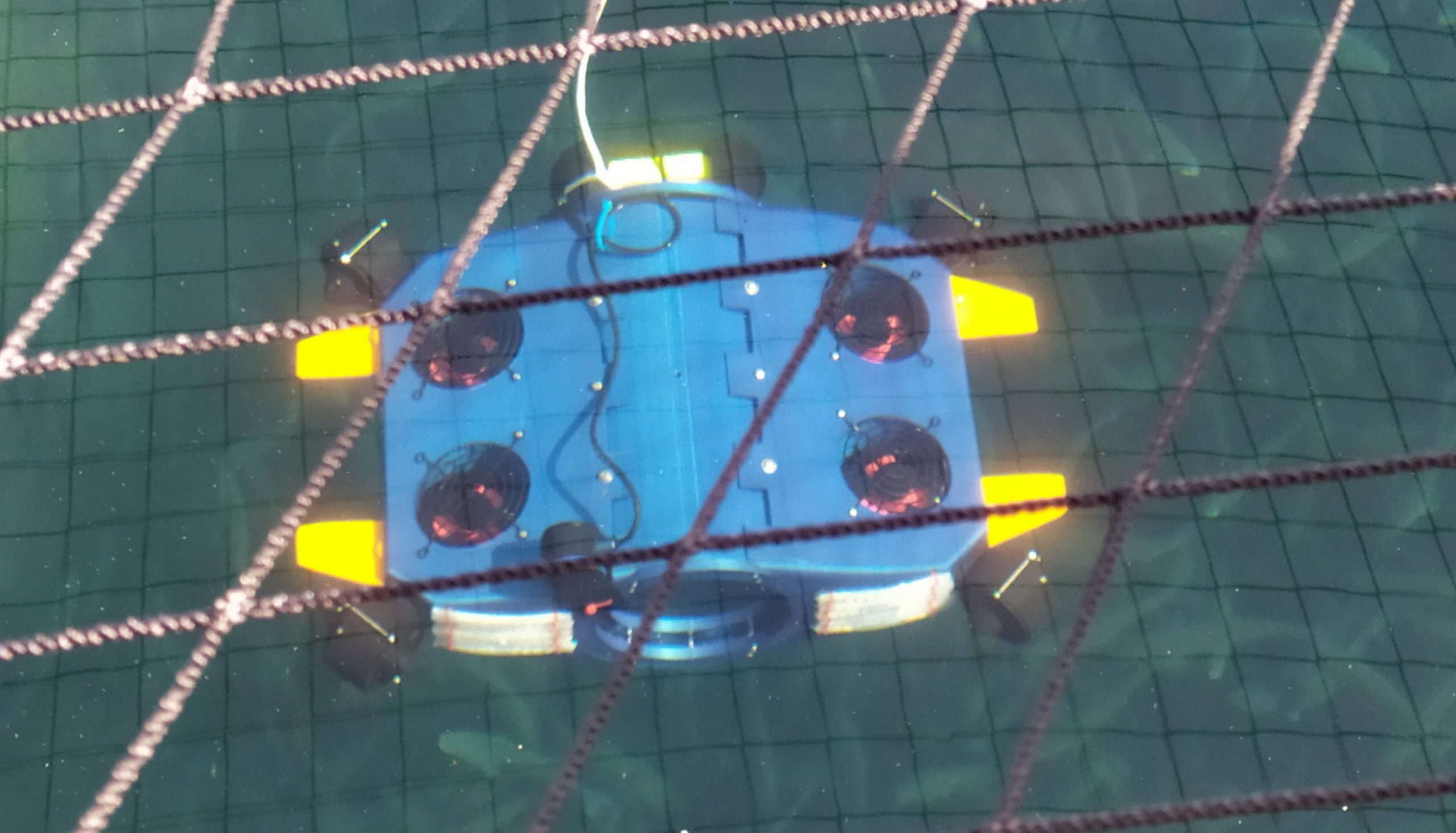
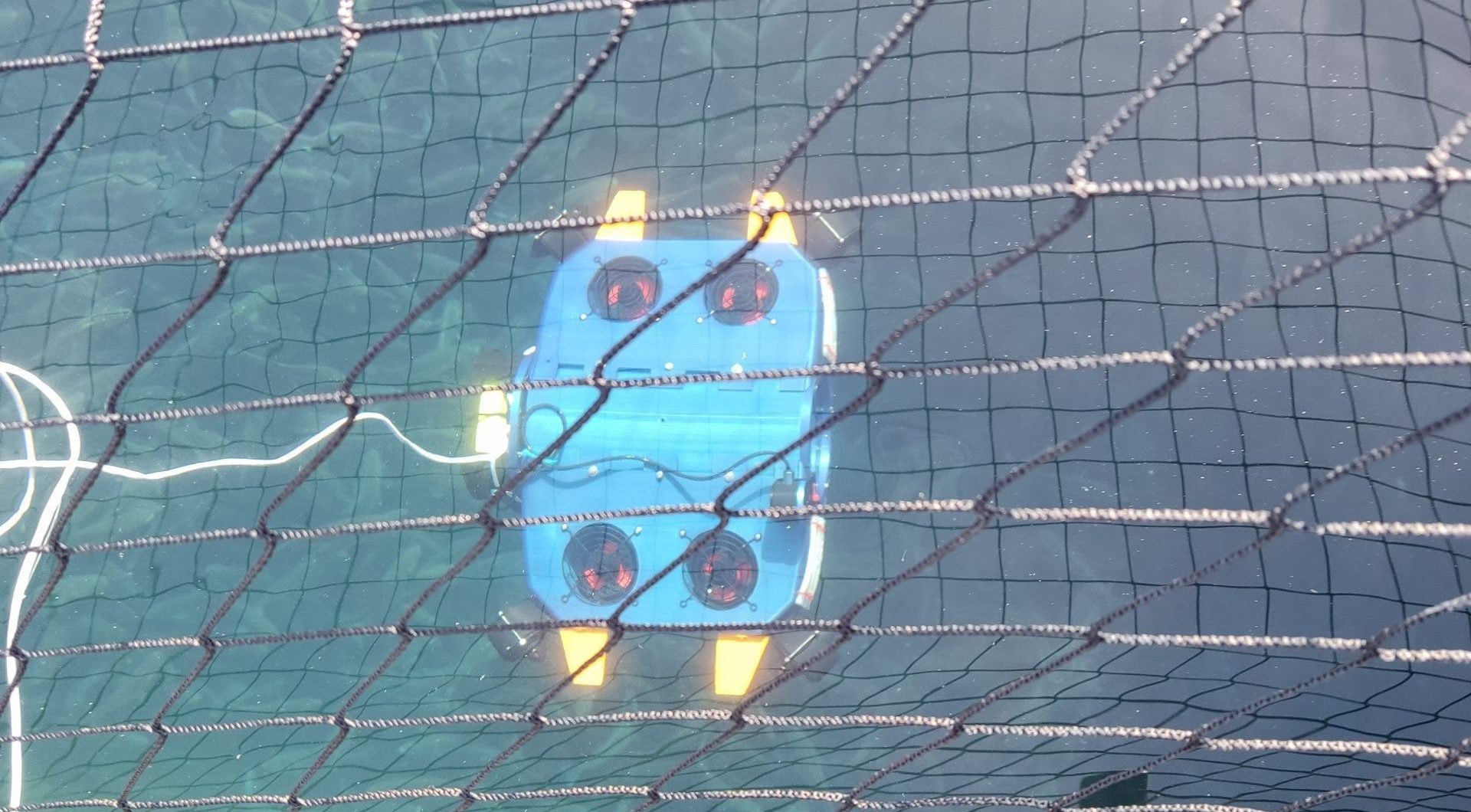
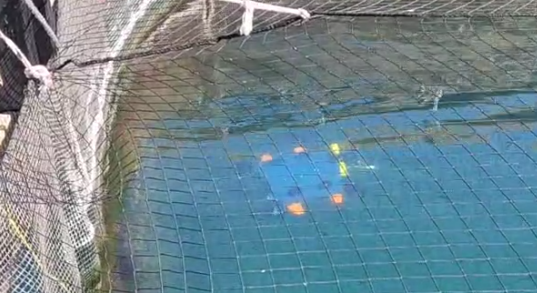
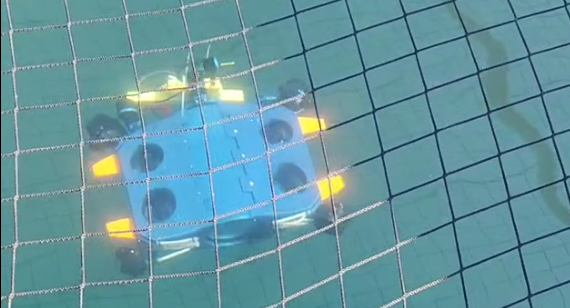
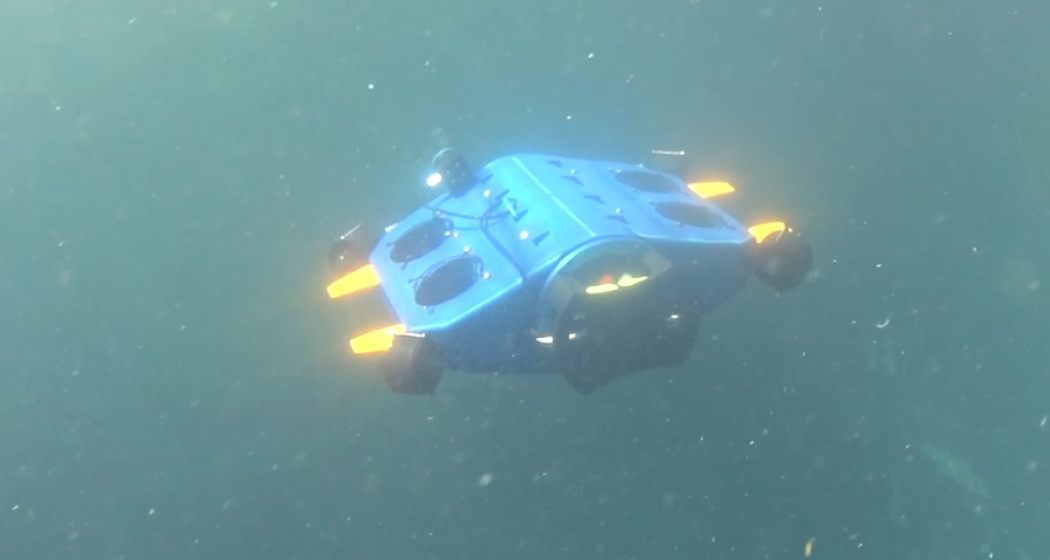
The project concerns the construction of a submarine vehicle (ROV) for the inspection and repair of fish farms in Greece using Computational Vision, in order to identify irregularities and damage.
Monitoring & Research
Collection of measurements for research and improvement of the growth rate of the products.
Quality Control
Evaluation of nutritional value and fish quality through specialized indicators.
Publications
M. Vasileiou, N. Manos, N. Vasilopoulos, A. Douma, and E. Kavallieratou, Kalypso Autonomous Underwater Vehicle: A 3D-printed Underwater vehicle for inspection at Fisheries, Journal of Mechanisms and Robotics, ASME, 2024 (May 2, 2023).
DOI: 10.1115/1.4062355Vasileiou, M., Manos, N., & Kavallieratou, E., IURA: An Inexpensive Underwater Robotic Arm for Kalypso ROV. In 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME) (pp. 1-6). IEEE (2022, November).
DOI: 10.1109/ICECCME55909.2022.9988259M. Vasileiou, N. Manos, and E. Kavallieratou, MURA: A Multipurpose Underwater Robotic Arm mounted on Kalypso UV in Aquaculture, Springer, Marine Systems & Ocean Technology, 2023.
DOI: 10.1007/s40868-023-00129-2M. Rousouliotis, M. Vasileiou, N. Manos, and E. Kavallieratou, Employing an underwater vehicle in education through a learning programming platform to boost motivation and creativity, Computer Applications in Engineering Education, Wiley, 2023.
DOI: 10.1002/cae.22693E. Kavallieratou, K. Paraskevas and M. Vasileiou, Building Kalypso: The Software, 2023 7th International Conference on Robotics and Automation Sciences (ICRAS), IEEE, Wuhan, China, 2023, pp. 37-42.
DOI: 10.1109/ICRAS57898.2023.10221581N. Manos, M. Vasileiou, and E. Kavallieratou, Building Kalypso: The Construction, 5th International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2023), Tenerife (Canary Islands), IFSA, Spain, 7-9 June, pp. 195–198, 2023.
N. Vasilopoulos, E. Kavallieratou, and E. Stamatatos, Building Kalypso: The navigation system, 5th International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2023), Tenerife (Canary Islands), IFSA, Spain, 7-9 June, 2023.
K. Paraskevas and E. Kavallieratou, Detecting Holes in Fish Farming nets: A Two–Method approach, 2023 International Conference on Control, Automation and Diagnosis (ICCAD), IEEE, Rome, Italy, 2023.
DOI: 10.1109/ICCAD57653.2023.10152452M. Vasileiou, N. Manos, and E. Kavallieratou, An Underwater Vehicle for Aquaculture Inspection, 7th International Conference on Control, Automation and Diagnosis (ICCAD’23), IEEE, Rome, Italy, 2023.
DOI: 10.1109/ICCAD57653.2023.10152412M. Vasileiou, N. Manos, and E. Kavallieratou, IURA: An Inexpensive Underwater Robotic Arm for Kalypso ROV, 2022 IEEE International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), pp.832-837, IEEE, Male, Maldives, 2022.
DOI: 10.1109/ICECCME55909.2022.9988259K. Paraskevas and E. Kavallieratou, Detecting Holes in Fishery Nets using an ROV, 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME) 2022, IEEE, Male, Maldives, pp. 1282-1286.
DOI: 10.1109/ICECCME55909.2022.9988724M. Vasileiou, N. Manos, and E. Kavallieratou, A Low-Cost 3D Printed Mini Underwater Vehicle: Design and Fabrication, 2021 IEEE 20th International Conference on Advanced Robotics (ICAR), IEEE, Lubiana, Slovenia, pp.390-395, 2021.
DOI: 10.1109/ICAR53236.2021.9659412Creation of a Multimodal Biometric Password by using Steganography
New Researchers
Recent device implementations require biometric features to unlock devices to ensure greater security. Such systems mainly use computer vision algorithms to analyze images and identify users.
Recent research has shown that a biometric identification system can be cheated using fake biometric features.
For these reasons and to simplify user identification, we suggest creating a multimodal biometric code. This code will be generated by combining the user’s biometric features with a sealing process, making it unique to each individual. We will explore various feature combinations and experimentally demonstrate their safety to determine the most effective approach.
Publications
K. Karampidis, M. Rousouliotis, E. Linardos, and E. Kavallieratou,
A comprehensive survey of fingerprint presentation attack detection,
Journal of Surveillance, Security and Safety, 2021.
K. Karampidis, E. Linardos, and E. Kavallieratou,
StegoPass – Utilization of Steganography to Produce a Novel Unbreakable Biometric Based Password Authentication Scheme,
Computational Intelligence in Security for Information Systems Conference, 2021.
K. Karampidis, E. Kavallieratou, and G. Papadourakis,
A dilated convolutional neural network as feature extractor – A hybrid classification scheme,
Pattern Recognition and Image Analysis, Vol. 30, No. 3, pp. 342–358, Springer, 2020.
K. Karampidis, N. Vasilopoulos, C. Cuevas, C. R. del-Blanco, E. Kavallieratou, and N. García,
Overview of the ImageCLEFsecurity 2019: File Forgery Detection Tasks,
Conference and Labs of the Evaluation Forum, 2019.
Experimental Analysis of Educational Data
Project with ATHENA Research Center (Greece)
As specified in the SlideWiki Grant Agreement, the call for tender is addressed to organizations and institutions and is managed by a consortium of leading international partners:
- Leibniz University of Hannover
- The Open University (UK)
- ATHENA Research Center
- Institute for Applied Informatics
The selected bids serve to assess SlideWiki‘s effectiveness and its educational impact, ensuring the platform delivers on its goals through rigorous testing and real-world application.
Document Image Layout Analysis
Project with MEDIA OBSERVER (Jordan)
Development of Page Layout Analysis Application
The project involves the development of a Windows desktop application for advanced document processing. The system architecture consists of a Graphical User Interface (GUI) and a specialized Dynamic Link Library (DLL).
- Ingestion: Importing high-quality document images (newspapers, journals, magazines).
- Segmentation: DLL-driven analysis to segment pages into non-overlapping blocks.
- Classification: Categorization of blocks into Text or Graphics (logos, photos, diagrams).
- Output: Generation of XML files containing bounding polygon coordinates and block classes.
Development utilizes real-world image samples provided by the client for system training and performance evaluation. The final accuracy is optimized based on the size and variability of the dataset provided.
N. Vasilopoulos, Yazan Wasfi, E. Kavallieratou, Automatic Text Extraction from Arabic Newspapers, International Conference Image Analysis and Recognition, pp.505-510, 2018
SlideWiki: Open Course Ware Platform
It is an open online system for creating Open Course Ware material (open source material). That is, it provides educational material online, multilingual, open content and evolving on the basis of cooperation and voluntary contribution of the members of the platform.
SlideWiki aims to cultivate knowledge communities around the world by making content available to a global audience.
Project Goals
- Developing, testing, and evaluating the SlideWiki platform with 17 international partners.
- Utilizing interactive and open tools to empower collaborative learning.
- Improving the efficiency of creating rich, licensed educational materials for everyone.
AUV Creation for Fisheries-Fish Quality Control Project

PROJECT ABSTRACT
The project concerns the construction of a robotic underwater vehicle (ROV) for the inspection and repair of fish farms in Greece using Computational Vision, in order to identify anomalies and damage. At the same time, it will collect measurements to research and improve the growth rate of products. On the second level quality control of fish and evaluation of their nutritional value will be carried out by measuring quality indicators such as eicosapentaenoic and docosahexaenoic acid, biogenic amines, trimethylamine and others. Fish are considered to be a source of animal protein and fat of high nutritional value. More specifically ω-3 polyunsaturated fatty acids containing and especially eicosapentaenoic and docosahexaenoic acid have been associated with a protective effect against cardiovascular diseases, proper brain function, etc. These reasons arise in the fact that the value of world trade in fish and fishery products has increased significantly, while exports are rising globally from $ 8 billion in 1976 to $ 143 billion in 2016. Based on the assumption of greater demand and technological improvements , world fish production (capture and aquaculture, excluding aquatic plants) is expected to continue to rise during the projection period, reaching 201 million tonnes in 2030. The intent of this work is the use of robotics and electronic vision to make this work easier and cheaper for aquaculture units. This is a demanding need for the Greek aquaculture industry, a very important sector for the Greek economy and in sensitive areas such as the remote coast or the islands, where unemployment is greater and facilities are more difficult and costly. At the same time, this equipment will also perform measurements for the purpose of research to improve the company’s products. On the second level, the evaluation – ensuring the quality of the products produced – is now a legal requirement and a prerequisite for the production of safe products and their successful marketing, gaining consumer confidence.Press - Media
- H Εργίνα Καβαλλιεράτου, Καθηγήτρια στο Πανεπιστήμιο Αιγαίου, παρουσιάζει το υποβρύχιο ρομπότ Καλυψώ, στις «Ψηφιακές Κυριακές» του Πρώτου Προγράμματος της ΕΡΤ με τη δημοσιογράφο Γεύση Καϊμάκη. – Ergina Kavallieratou, Professor at the University of the Aegean, presents the underwater robot Calypso, in the “Digital Sundays” of ERT’s First Programme with journalist Gevsi Kaimaki. (Ψηφιακές Κυριακές)
- Ελληνικό ρομπότ προστατεύει τις ιχθυοκαλλιέργειες (Ναυτεμπορική) – Greek robot protects fish farms (Naftemporiki)
- Νέο δίπλωμα ευρεσιτεχνίας για την ομάδα AegeanRobotics του Πανεπιστημίου Αιγαίου – New patent for the AegeanRobotics team of the University of the Aegean (samiaki.tv)
- Δίπλωμα Ευρεσιτεχνίας για την ομάδα AegeanRobotics του τμήματος Πληροφοριακών και Επικοινωνιακών Συστημάτων (Πανεπιστήμιο Αιγαίου, Σάμος) – New patent for the AegeanRobotics team of the Information and Communication Systems Department (University of the Aegean, Samos) (samos24.gr)
- Νέο δίπλωμα ευρεσιτεχνίας από το τμήμα Πληροφοριακών και Επικοινωνιακών Συστημάτων (Πανεπιστήμιο Αιγαίου, Σάμος) – New patent from the Department of Information and Communication Systems (University of the Aegean, Samos) (samiakonvima.gr)
- Πατέντα σε ελληνικό ρομπότ – επιθεωρητή των ιχθυοκαλλιεργειών – Patent on a Greek robot – inspector of fish farms (dnews.gr)
- Υποβρύχιο σύστημα επιτήρησης διχτύων ιχθυοτροφείων στα νερά Αργοστολίου-Ληξουρίου – Underwater surveillance system for fish farm nets in Argostoli-Lixouri waters (inkefalonia.gr)
- Το ρομποτάκι Kalypso φροντίζει και προσέχει τα Ιχθυοτροφεία Κεφαλονιάς – The Kalypso robot takes care of the fish farms of Kefalonia (efimeridakefalonia.gr)
- Τα Ιχθυοτροφεία Κεφαλληνίας ευχαριστούν Ομάδα καθηγητών του Πανεπιστημίου Αιγαίου και το ρομποτάκι KALYPSO – The Kefalonia Fisheries thank a team of professors of the University of the Aegean and the robot KALYPSO (kefaloniapress.gr)
- Ρομπότ προστατεύει ιχθυοκαλλιέργειες! – Robot protects fish farms! (wifinews.gr)
- Συνέντευξη στην εκπομπή “NEWSROOM” στo ERTNEWS – Interview on the “NEWSROOM” TV programme on ERTNEWS
Photo Galery



Videos
Publications
- M. Vasileiou, N. Manos, N. Vasilopoulos, A. Douma, and E. Kavallieratou, Kalypso Autonomous Underwater Vehicle: A 3D-printed Underwater vehicle for inspection at Fisheries, Journal of Mechanisms and Robotics, ASME, 2024 (May 2, 2023). https://doi.org/10.1115/1.4062355.
- Vasileiou, M., Manos, N., & Kavallieratou, E.. IURA: An Inexpensive Underwater Robotic Arm for Kalypso ROV. In 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME) (pp. 1-6). IEEE (2022, November). https://doi.org/10.1109/ICECCME55909.2022.9988259
- M. Vasileiou, N. Manos, and E. Kavallieratou, MURA: A Multipurpose Underwater Robotic Arm mounted on Kalypso UV in Aquaculture, Springer, Marine Systems & Ocean Technology, 2023. https://doi.org/10.1007/s40868-023-00129-2
- M. Rousouliotis, M. Vasileiou, N. Manos, and E. Kavallieratou, “Employing an underwater vehicle in education through a learning programming platform to boost motivation and creativity”, Computer Applications in Engineering Education, Wiley, 2023 (Accepted)
- E. Kavallieratou, K. Paraskevas and M. Vasileiou, Building Kalypso: The Software, 2023 7th International Conference on Robotics and Automation Sciences (ICRAS), IEEE, Wuhan, China, 2023, pp. 37-42. https://doi.org/10.1109/ICRAS57898.2023.10221581.
- N. Manos , M. Vasileiou, and E. Kavallieratou, Building Kalypso: The Construction, 5th International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2023), Tenerife (Canary Islands), IFSA, Spain, 7-9 June, pp. 195–198, 2023.
- N. Vasilopoulos, E. Kavallieratou, and E. Stamatatos, Building Kalypso: The navigation system, 5th International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2023), Tenerife (Canary Islands), IFSA, Spain, 7-9 June, 2023.
- K. Paraskevas and E. Kavallieratou, Detecting Holes in Fish Farming nets: A Two–Method approach, 2023 International Conference on Control, Automation and Diagnosis (ICCAD), IEEE, Rome, Italy, 2023. https://doi.org/10.1109/ICCAD57653.2023.10152452.
- M. Vasileiou, N. Manos, and E. Kavallieratou, An Underwater Vehicle for Aquaculture Inspection, 7th International Conference on Control, Automation and Diagnosis (ICCAD’23), IEEE, Rome, Italy, 2023. https://doi.org/10.1109/ICCAD57653.2023.10152412.
- M. Vasileiou, N. Manos, and E. Kavallieratou, IURA: An Inexpensive Underwater Robotic Arm for Kalypso ROV, 2022 IEEE International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), pp.832-837, IEEE, Male, Maldives, 2022. https://doi.org/10.1109/ICECCME55909.2022.9988259.
- K. Paraskevas and E. Kavallieratou, Detecting Holes in Fishery Nets using an ROV, 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME) 2022, IEEE, Male, Maldives, pp. 1282-1286,. https://doi.org/10.1109/ICECCME55909.2022.9988724.
- M. Vasileiou, N. Manos, and E. Kavallieratou, A Low-Cost 3D Printed Mini Underwater Vehicle: Design and Fabrication, 2021 IEEE 20th International Conference on Advanced Robotics (ICAR), IEEE, Lubiana, Slovenia, pp.390-395, 2021. https://doi.org/10.1109/ICAR53236.2021.9659412.
PhDs
- Marios Vasileiou – Underwater Robotics (completed)
- Minas Rousouliotis – Educational process mining using robots (completed)
- Nikolaos Manos – Underwater Robotics – The Problems (in Progress)
Presentation to the funder evaluators
This research has been co‐financed by the European Union and Greek national funds through the Operational Program Competitiveness, Entrepreneurship and Innovation, under the call RESEARCH – CREATE – INNOVATE (project code: T2EDK- 02504).
