IROS Competition 2022

1. Task
1.1 The competition consists of three tasks
1.2. 1st task: the robot should balance its weight immovable, carrying an additional weight of 500 gr (a plastic bottle of water) on a completely flat surface. The total time of the effort could be up to 3mins. It earns one point/sec and it doesn’t count after the 3 mins of the effort.
1.3. 2nd task: the robot should be balanced immovable on an inclined ramp, at least 15o, without the bottle. The total time of the effort could be up to 3mins. The points it earns is two points/sec and it doesn’t count after the 3 mins of the effort.
1.4. 3rd task: the robot should carry a bottle of 500 gr at a distance of 1m, on a completely flat surface. It has 100 seconds to complete the task. It earns one point per second, for the remaining time until the completion of 100 seconds.
2. The Robot
2.1. The height of the robot from the floor surface should be at least 25 cm (not included the bottle height)
2.2. The bottle will be placed upright on the surface of the robot.
2.3. The weight of the robot should be over 500gr and less than 1kg.
2.4. The maximum dimensions in length and width should be 15 x 15 cm, including the wheels.
2.5. Up to 2 motors and 2 coaxial wheels with a width of up to 2 cm each are allowed to move the robot, which are the only points where the robot touches the ground.
2.6. All wheels should move freely.
2.7. There is no restriction on the microprocessors and sensors to be used.
2.8. The robot may be built from any kind of material.
2.9. The robot should be absolutely free, without something to keep it on the ground or keeping the weight on it e.g. glue, construction, etc.
2.10. It is not allowed to use any technology to change the weight of the robot or to attach the robot to the ground.
2.11. Before the match the robots will be homologated. During the homologation, following adhesion test will be performed: the robot will be laid on a sheet of paper. It will pass the test, if this paper stays on the ground when the robot is lifted with its adhesion technologies turned on.
2.12. The committee will check whatever concerns the requirements set by the tasks.
3. The Contest
3.1. 1st task: the robot should balance its weight immovable, carrying an additional weight of 500 gr (a plastic bottle of water) on a completely flat surface.
3.1.1. If robot fails to balance, it will have another attempt.
3.1.2. The total time of every effort could be up to 3mins.
3.1.3. The inclination of the surface should be 0 degrees.
3.1.4. The bottle should weighs 500 gr altogether (bottle and content)
3.1.5. The score is 1 point for every successful second of the same effort.
3.1.6. After the 3 mins the effort doesn’t count.
3.1.7. If a robot doesn’t balance even in the second attempt, it takes no point (zero 0).
3.1.8. The committee gives the signal for the start and puts on the chronometer.
3.1.9. After putting on the chronometer, no communication is allowed with the robot or the trial is canceled.
3.1.10. The committee gives the signal for the end.
3.2. 2nd task: the robot should be balanced immovable on an inclined ramp, at least 15o, without the bottle.
3.2.1. If robot fails to balance, it will have another attempt.
3.2.2. The inclination of the surface should be at least 15 degrees.
3.2.3. The total time of every effort could be up to 3mins.
3.2.4. The score is 2 points for every successful second of the same effort
3.2.5. After the 3 mins the effort doesn’t count.
3.2.6. If a robot doesn’t balance even in the second attempt, it takes no point (zero 0).
3.2.7. The committee gives the signal for the start and puts on the chronometer.
3.2.8. After putting on the chronometer, no communication is allowed with the robot or the trial is canceled. The committee gives the signal for the end.
3.3. 3rd task: the robot should carry a bottle of 500 gr at a distance of 1m, on a completely flat surface. It has 100 seconds to complete the task.
3.3.1. If robot fails to balance, it will have another attempt.
3.3.2. It earns one point per second, for the remaining time until the completion of 100 seconds.
3.3.3. On the surface should be stacked a measuring tape of 1 meter with the measures visible.
3.3.4. The inclination of the surface should be 0 degrees.
3.3.5. The bottle should weighs 500 gr altogether (bottle and content)
3.3.6. The total time of every effort is up to100 secs.
3.3.7. After the 100 secs the effort doesn’t count.
3.3.8. The starting and ending point will be marked on the ground.
3.3.9. If a robot doesn’t balance even in the second attempt, it takes no point (zero 0).
3.3.10. The committee gives the signal for the start and puts on the chronometer.
3.3.11. After putting on the chronometer, no communication is allowed with the robot or the trial is canceled.
3.4. Total score: 1st task points + 2nd task points + 3rd task points
3.5. Winner is the robot with the highest score
3.6. In case of draw in the final standings, the lighter robot will have the advantage.
3.7 If there is draw again, the robot with the best score in the second task will have the advantage.
4. Playground
4.1. For the first task the playground will be a very flat surface.
4.1.1.The inclination of the surface should be 0 degrees.
4.1.2.The dimensions of the surface should be apr. 50cm X 50cm
4.1.3.The surface of the playground must be completely smooth, without protrusions, little bumps or other configurations that help the robot to be attached on it.
4.1.4.Playground can be the floor itself as long as the rest regulations are fulfilled
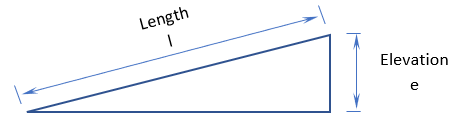
4.2. For the second task the playground will be an inclined ramp.
4.2.1.The inclination of the surface should be at least 15 degrees.
4.2.2.The width of the surface should be apr. 50cm
4.2.3.In order to achieve the 15 degrees inclination of the surface, you can get values for the length and elevation of the surface from the table below
4.2.4.The surface of the playground must be completely smooth, without protrusions, little bumps or other configurations that help the robot to be attached on it.

4.3. For the third task the playground will be a very flat surface.
4.3.1. On the surface should be stacked a measuring tape of 1 meter with the measures visible.
4.3.2. Α start line and a finish line at a distance of 1 meter should be marked on the surface
4.3.3. The inclination of the surface should be 0 degrees.
4.3.4. The length of the surface should be at least 150cm. The width should be apr. 50cm
4.3.5. The surface of the playground must be completely smooth, without protrusions, little bumps or other configurations that help the robot to be attached on it.
4.3.6. Playground can be the floor itself as long as the rest regulations are fulfilled
5. Power of Officials and Liability
5.1. If a robot or a participant violates the rules, the referee may disqualify them from the task. He may also disqualify the participant or the robot for further tasks.
5.2. No objections against the decisions of the referee or the organizers are allowed.
5.3. The decision of the referees is not subject to appeals. Complaints must be submitted during or immediately after the match. Any later complaints will not be accepted. In case of any conflicts or disputes, the final word will be said by the referees and the organizers
5.4. Regulations may be updated without prior notice and therefore you should be in constant contact.
5.5. The participants are responsible for their robots and their safety and will be liable for all damages caused by them, their robots or their equipment.
5.6. The organizers will not be under any circumstances held liable or responsible for any accidents of the participants or any damages caused by the participants, their robots or their equipment.


